机器人系统
机器人系统的介绍
是机器人手臂进行现有人正进行的工作的装设的工作,并且能期待削减失误,高效率化。
实际成果例1:工作搬运机器人系统
◆不要人的手的自动搬运3尺寸,6种工作的线
工作人员对自动搬运车从前工程起搭载工作,在线里搬进的话机器人在各工程搬运工作,和成品大体上成为,被在线外面搬运车自动搬出。
工作人员对自动搬运车从前工程起搭载工作,在线里搬进的话机器人在各工程搬运工作,和成品大体上成为,被在线外面搬运车自动搬出。
| <系统构成> |
| 机床台数 | *3台水平形MC ULTY501 |
| 工作搬运机器人 | 2架 |
| 固定机 | 1架 |
| 自动搬运车 | 2台 |
| 计测器械 | 1架 |
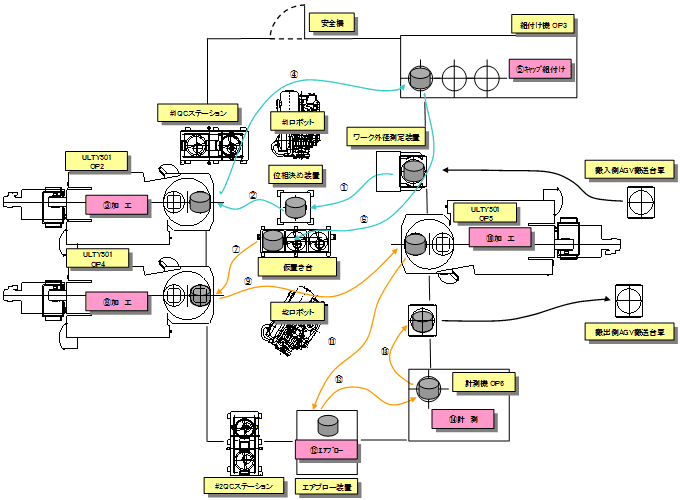
①~⑥的 → ha#1机器人的搬运途径
⑦~⑮的 → ha#1机器人的搬运途径

实际成果例2:重量工具交换机器人系统
◆在机器人手交换重量工具
利用机器人系统,实现了在常规的ATC,不能交换的过分的瞬间、重量工具的ATC。
| <系统构成> |
| 机床台数 | *1台水平形MC HN63E |
| 工具交换机器人 | 1架 |
| 工具置台 | 1搁板 |

HN63E标准工具最大质量:30kg
↓
机器人系统工具最大质量 :35kg
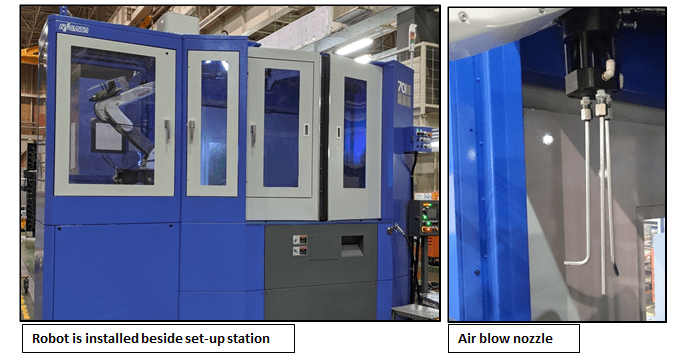
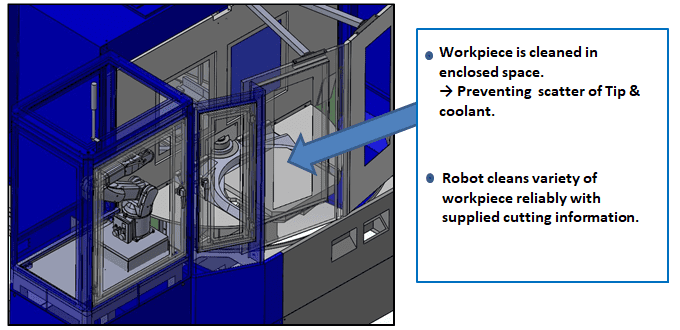
实际成果例3:工作空气吹头发的机器人系统
◆出自机器人的工作,模具的空气吹头发,洗涤
是对人进行的工作的机器人化和自动化的尝试。
用危险实现麻烦的工作的减低。
是对人进行的工作的机器人化和自动化的尝试。
用危险实现麻烦的工作的减低。
| <系统构成> |
| 机床台数 | *1台水平形MC ULTY701 |
| 机器人 | 1架 |
| 外观 | 有与MC的一体感的系统 |
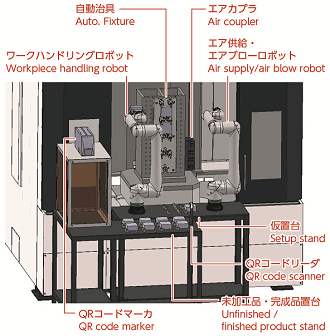
实际成果例4:出自合作机器人的自动化系统
●利用二维码的工作管理系统
被对工作信息,加工信息和二维码带子zukeshi数据库进行自动登记。
被产品可溯性的管理做出贡献。
被对工作信息,加工信息和二维码带子zukeshi数据库进行自动登记。
被产品可溯性的管理做出贡献。
●编后记可能的模具扣子·安扣子系统
无机械一侧的改造而实现自动模具化。
用OSK锁头不需要加工中的空气加压。
用OSK锁头不需要加工中的空气加压。
※二维码是株式会社DENSO WAVEORPORATED的注册商标。
※OSK锁头是有限公司大阿久精工的产品。